DCS AH-64D Apache: Landing
This part of the DCS AH-64D Apache guide describes landing a helicopter. We present step by step how to land. We describe the landing types: rolling landing and VCM approach to hover / ground landing and the descent phase.
Last update:
In this chapter of the DCS AH-64D Apache simulator guide, we present detailed instructions for landing an Apache helicopter. We describe different types of approaches for landing: rolling landing and VMC Approach to Hover / Ground landing.
- Required keybinds
- Approaches types
- Landing configuration
- Descent and deceleration
- Landing VMC Approach To Hover / Ground
- Rolling Landing
Required keybinds
- Symbology Select FWD - IHADSS Display Mode: Transition / Cruise
- Symbology Select AFT - IHADSS Display Mode: Hover
- Force Trim AT Attitude Hold (Left) - locks the trimmer while holding acceleration / tilt Attitude Hold
- Force Trim R Release (Fwd) - locks the current position of the cyclic and anti-torque pedals
- Force Trim Reset - resets the trimmer lock
- Wheel Brakes
Approaches types
The ability of vertical landing at zero speed means that almost any piece of flat space with a suitable surface can be an Apache landing site. Approaches may vary depending on the objects surrounding the landing site and their height, size of the landing area, wind force, airbase procedures, helicopter technical condition and weight, etc. Generally, however, we can distinguish two main types of approaches:
VMC Approach To Hover / Ground - approach to landing with a transition to hovering over the landing zone. Depending on the surrounding of the landing site itself or required procedures, the transition to the hover may take place at a certain altitude or at the last moment, just before touchdown
Rolling Landing - approach to the runway and landing roll after touch down. It is usually performed if the runway is available or in emergency situations, like lose of engine power to hover (due to weather, helicopter weight), engine damage, autorotation, etc.
When approaching an unknown / random landing site, we perform a so-called "high recon", making a full circle over the landing site, checking it for all obstacles, tall objects, poles, type of surface,or slopes. If possible, you should land against the wind, so it's worth checking its direction by observing the surroundings. We choose the direction of the approach and possible departure, if the landing has to be aborted.

The transition to the hover can occur below 50 feet with the Inside Ground Effect (IGE) or above 50 feet - without the OGE (Outside Ground Effect). There may also be a transition from OGE to IGE. Note that the OGE requires more engine torque to stay in a hover. With the Inside Ground Effect, engine torque must be reduced, otherwise the helicopter will start to climb just before touch down.
Landing configuration

Armament A / S to SAFE , GND ORIDE to OFF .

Rear wheel locked - UNLOCK light is off.

ASE Countermeasures System OFF or SAFE (or as desired).

Parking brake released (handle in).
Descent and deceleration
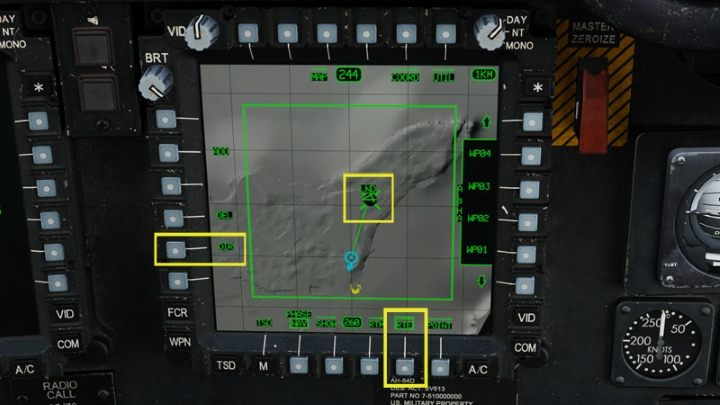
If possible, select a waypoint at the landing site as the active waypoint with the DIR (DIRECT TO) function from the RTE menu. Usually it is waypoint number C51 created at the beginning of the mission.

The distance to the landing site and its location will appear on the IHADSS.

Approach speed and altitude depend on the type of landing, the landing site, pilot's skills, and other factors. While still learning your first Apache landings, it is worth giving yourself more time and distance to descend and reduce speed. Approx. 3 km from the landing field, you should be no higher than 500 feet with airspeed around 50-70 knots.

The cyclic is used to reduce the speed. When we pull it, the LOS Reticle cross goes above the dashed horizon line and the helicopter will start to lose speed. Likewise, when pushing the cyclic forward and placing the LOS Reticle below the horizon line will, the helicopter will accelerate.

The collective controls altitude. Raising the collective and the engine torque increase altitude, lowering the collective reduces altitude.

The rate of descent in feet per minute is also very important when descending. It is shown by the small chevron on the altimeter tape. The thick line in the middle is 0 ft / min - level flight. The little dashes above and below are increments of 100 feet / minute. As you get closer to touchdown, the slower you should descend. It is also a good indicator to get an idea of whether the helicopter is going down or up. When operating the collective, you should always pay attention to the vertical speed chevron.

The cyclic and the collective have a direct impact on each other. Pulling the stick and slowing down increases altitude - so you need to lower the collective accordingly to maintain altitude or continue descending.

In the Transition mode of the IHADSS display, the flight path vector is very helpful. A few kilometers from the landing site fly the helicopter so the flight path vector is slightly above the place where you are going to land. The cyclic will control the vector's position sideways, and the collective: up or down.

Another helpful indicator is the cockpit frame above the CPG's helmet. During the approach, keep it slightly below the landing spot, while maintaining a constant distance between the frame and the landing site. You can make a relatively smooth and gradual approach in case you can't use IHADSS.

When descending, you can use the ALTITUDE and ATITUDE HOLD Force Trim modes. At speeds above 40 knots, it will maintain the helicopter pitch, if slower than 40 knots - it will maintain the current airspeed and between 0 and 5 knots - it will help to stay in a hover. Activation of ATTITUDE HOLD is confirmed by the box around the speed indicator on the IHADSS.
Landing VMC Approach To Hover / Ground

At approx. 2-3 kilometers to the landing site, fly at an altitude of approx. 500-300 feet and a speed of 70-50 knots. Place the flight path vector (FPV) slightly above the landing spot and continue your approach. At this stage, the flight path vector may not be perfectly centered over the touchdown spot, but slightly to the side. Control the descent speed. Use the Force Trim Attitude Hold mode if necessary.

At a distance of 1.5-1 kilometer, pull the cyclic slightly and start reducing the speed to approx. 30 knots. Watch your altitude and adjust the collective position to continue steady descending.

If it is active, turn off Attitude Hold mode with the Force Trim AT button (left). Depending on your skills and landing site surroundings, you will need to choose the right moment to drop speed below 10 knots. If you are not perfect in controlling the aircraft, it is always better to slow down too early than too late. The low speed before touch down will require a lot of anti-torque pedals compensation as below 20 knots the helicopter will already start rotating right due to the rotor effect. Below 10 knots, considerable pressure on the left anti-torque pedal will be required.

If the landing site is clear from obstacles, you can keep the flight path vector above the landing spot all the time. Below 50 feet and at a speed of approx. 10 knots, gently steer the helicopter to the touchdown point, controlling the cyclic, the collective and the anti-torque pedals.

If the landing area is obstructed by tall objects, transition to hover at a safe altitude and start descending directly above landing spot at zero speed. The Force Trim Atitude Hold mode will be very helpful in such situations. Just control the rate of descent with the collective. It is worth remembering that the Apache fuselage is 50 feet long and the cockpit is in the front, so in a tight space, you have to take this dimension into consideration when choosing the touchdown spot and approach direction.

Above the touchdown spot, speed should now be less than 5 knots, and altitude should be just a few feet. The rate of descent should not exceed a thick line of 0 ft / min up, just slightly below for the helicopter to continue its gentle descent.

Once you feel that the helicopter is "light on wheels", that is to say it is already touching the ground with the main wheels, you can lower the collective to neutral position and let the aircraft settle down. If the Apache is still rolling, use the wheel brakes to bring the aircraft to a full stop.


After stopping, taxi to the parking space or apply the parking brake.
Rolling Landing

Position the helicopter in front of the runway. At a distance of approx. 2-1.5 km, start your approach from an altitudet of approx. 500 feet and a speed not exceeding 50 knots.

Steer the helicopter to put the flight path vector slightly above the chosen touchdown point on the runway. Descent rate should be around 400-300 feet / minute at this stage. Control the collective to maintain FPV position above the touchdown spot.

At the same time, keep the LOS Reticle at the horizon line on the IHADSS to avoid slowing down too early.

Just before you reach the runway, start decelerating by pulling the cyclic and lifting the LOS Reticle above the horizon line. Lower the collective gently to maintain the descent rate at approx. 200 feet per minute.

Just above the runway, at altitude of approx. 50 feet, use the Force Trim to lock the anti-torque pedals so that the helicopter is flying straight over the runway.

Continue decelerating while keeping an eye on descend rate at 200 feet / minute. The closer you are to the ground, the descend rate should drop to approx. 100 feet / min. Also, be careful not to slow down too much and get into a hover. The helicopter should touch the runway at speed between 30-15 knots.

Once you feel "light on wheels", lower the collective to idle position. Wait for the tail wheel to touch the runway.

At this speed, do not use the wheel brakes to slow down. Pull the cyclic stick as in reverse taxi and the helicopter will naturally decelerate to 5-7 knots.


Exit the runway and continue taxiing to the parking spot.

You are not permitted to copy any image, text or info from this page. This site is not associated with and/or endorsed by the developers and the publishers. All logos and images are copyrighted by their respective owners.
Copyright © 2000 - 2025 Webedia Polska SA for gamepressure.com, unofficial game guides, walkthroughs, secrets, game tips, maps & strategies for top games.